Samuel C. Buckner
Graduate Researcher in Autonomous Systems

I am a fourth-year Ph.D. student in the Aeronautics & Astronautics Department at the University of Washington, working with the Autonomous Controls Laboratory under Dr. Behçet Açıkmeşe. My research interests are divided between developing practical, real-time numerical algorithms and applying them to relevant real-world scenarios in aerospace engineering and, more broadly, in autonomous systems. This constitutes:
- Convex Optimization (Convex Approximation Methods)
- Real-Time Trajectory Optimization (Sequential Convex Programming)
- Perception-In-The-Loop Planning (Active Navigation)
- Primary Applications:
- Spaceflight: Landing Vehicles, Powered Descent Guidance, Relative Orbital Maneuvers
- Aeronautics: Multirotors, eVTOLs
Academically, I graduated Summa Cum Laude from the University of Florida with a B.S. in Aerospace Engineering (2020), and am the recipient of both the NSF GRFP and ARCS fellowships for graduate research. Professionally, I have spent six rotations working with NASA as a Pathways Co-Op, as well as two internships in the spaceflight industry with Blue Origin. Have a look through my website to learn more!
Experience Overview
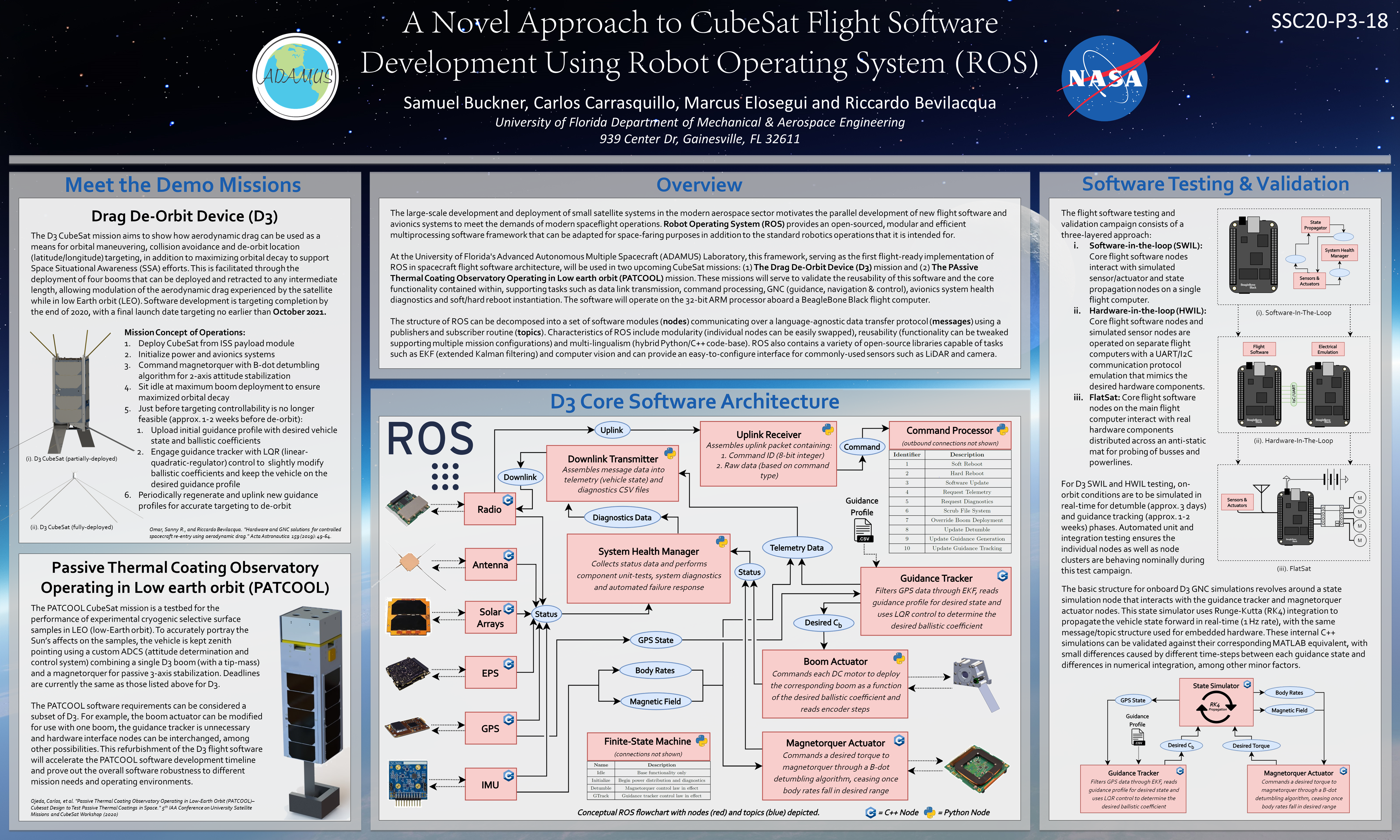
In the aerospace domain, autonomous systems are typically defined by three core modules: guidance (otherwise known as path planning or feedforward control), navigation (referring to state estimation and perception) and control (referring to lower-level feedback control), collectively referred to as GN&C. My experience spans all three of these fields, as well as more high-level software design for GN&C systems (including simulation and testing).
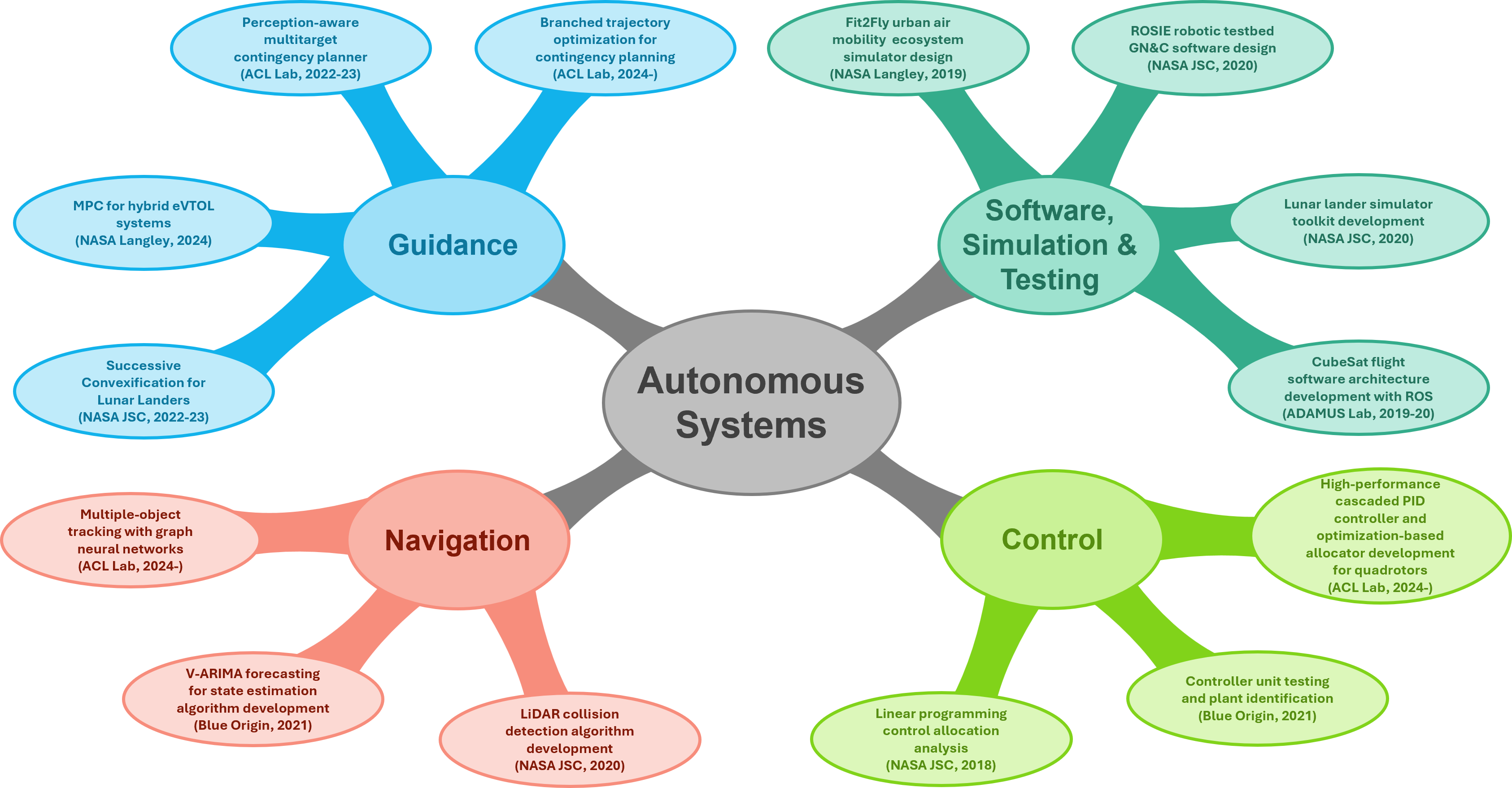
Research Showcase