Constrained Visibility Guidance (CVG) presents a novel approach to modeling terrain scanning constraints for powered landing maneuvers using a novel theory of constrained conic intersections. This includes two separate levels of algorithmic fidelity:
A high-fidelity 6-DoF (translation + rotation) model using sequential convex programming (SCP) (Buckner et al., 2024)
A medium-fidelity 3-DoF (translation-only) model using lossless convexification (LCvx) (Shaffer et al., 2024)
Both of these models were developed as part of my 2023 rotation at the NASA Johnson Space Center.
6-DoF SCP Approach
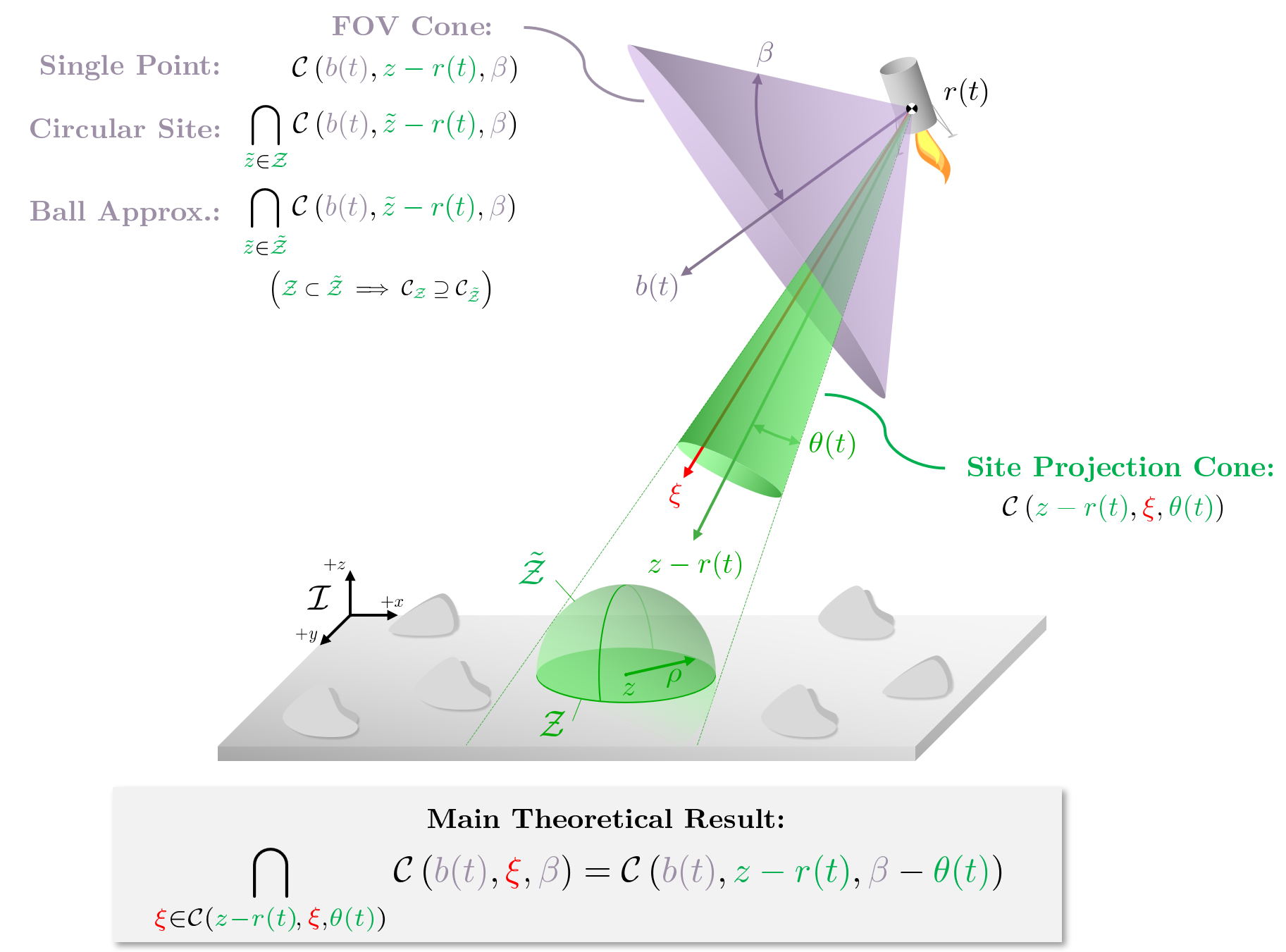
The objective of CVG is to model a constraint which restricts the field of view (FOV) of an onboard perception sensor -- typically parameterized by a cone about the sensor's pointing direction -- to obtain full coverage of a circular region of interest on the ground. Contributions of this work included:
Definition of a 6-DoF constraint set (position + quaternion attitude) that guarantees FOV capture of this region of interest with arbitrary centroid location and radius.
Introduction of a new theory of constrained conic intersections to validate the guarantees of this constraint set.
Formulation of various SotA techniques in SCP modeling and optimal control catered to specification of terrain scanning events.
Efficient initialization of SCP algorithms under this problem class by converting 3-DoF solutions to proximal 6-DoF solutions.
Diagram visually showing the main theoretical result
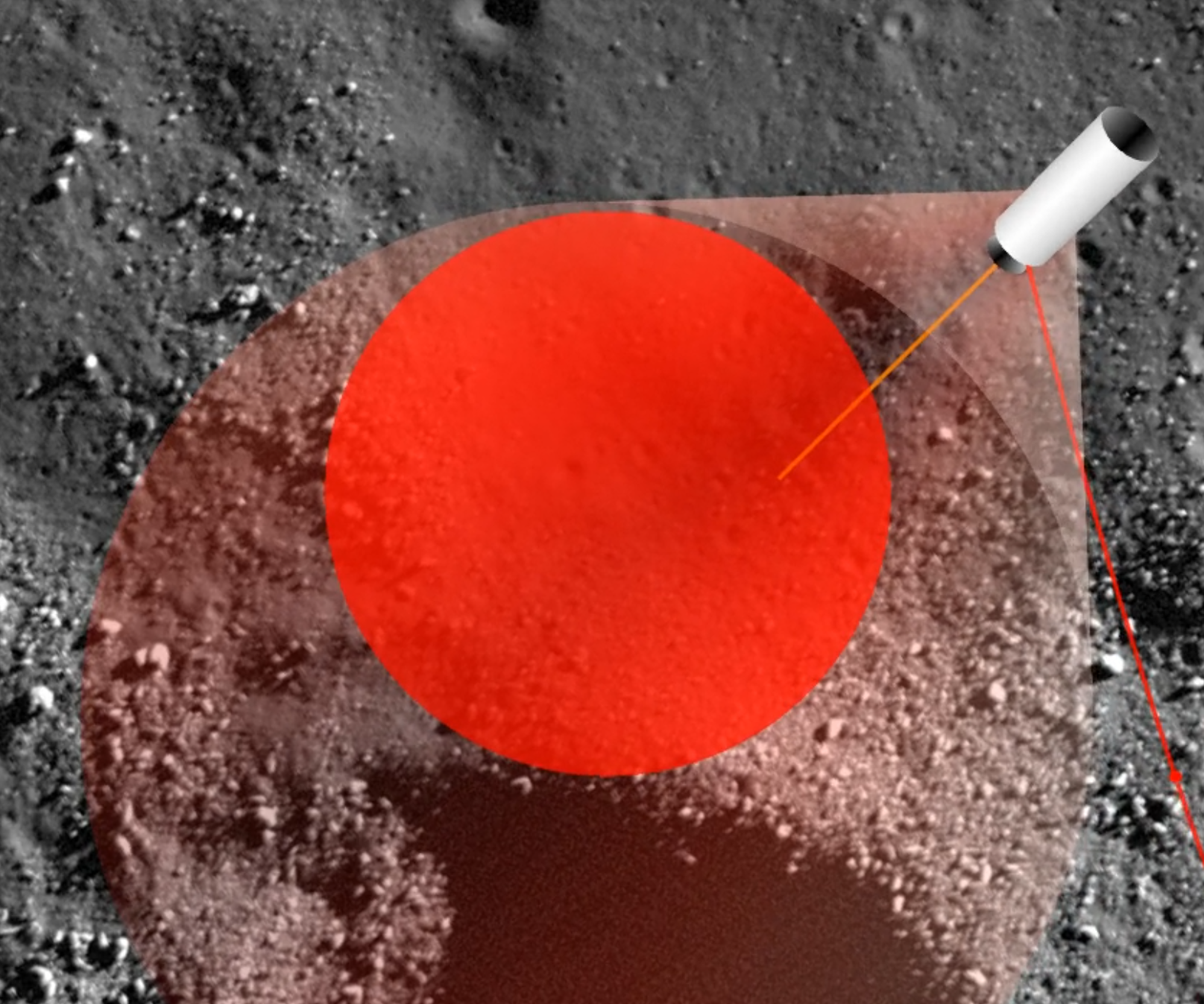
CVG demo of a landing maneuver with three terrain scanning events (for three separate regions of interest)
3-DoF LCvx Approach
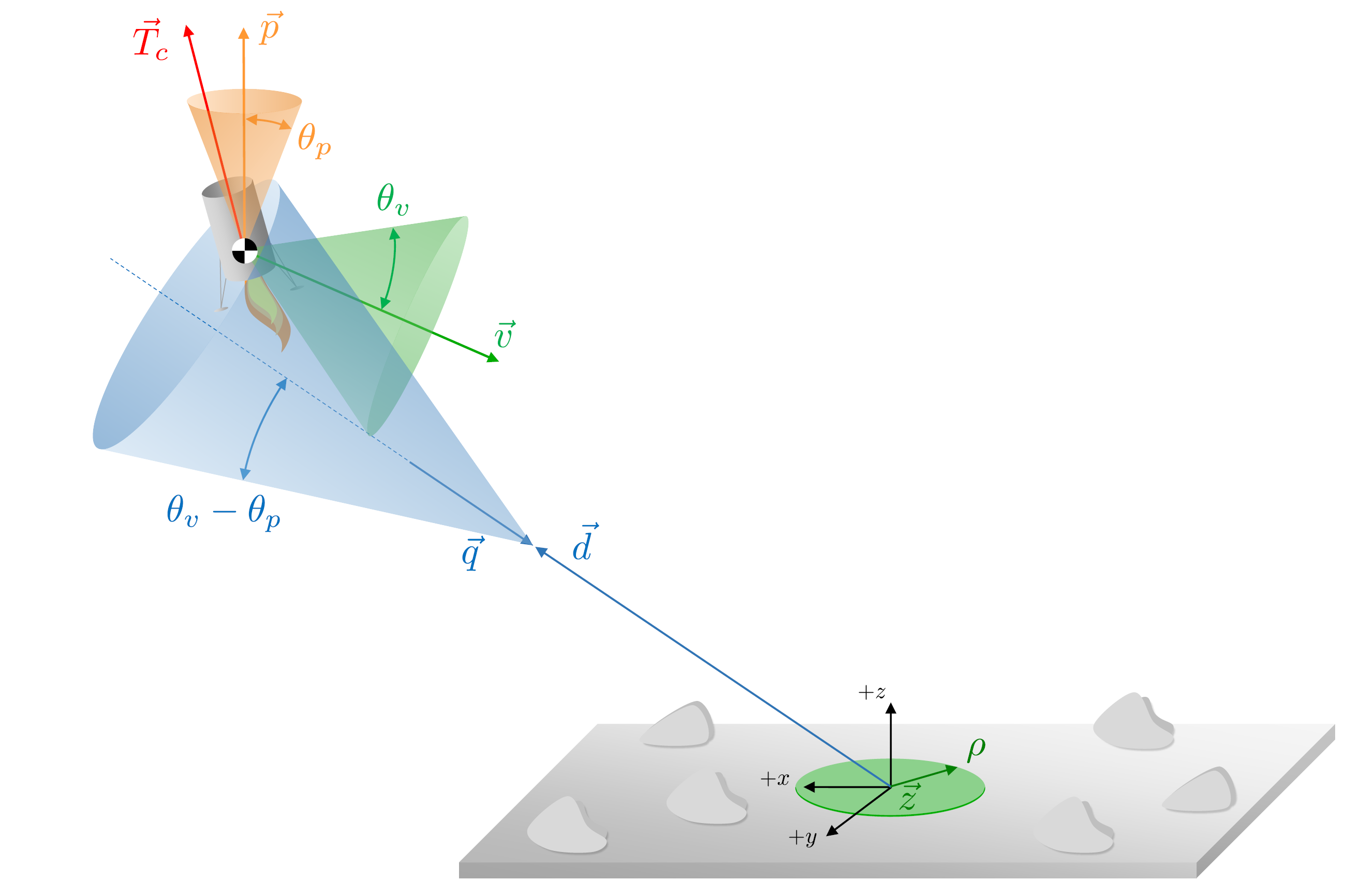
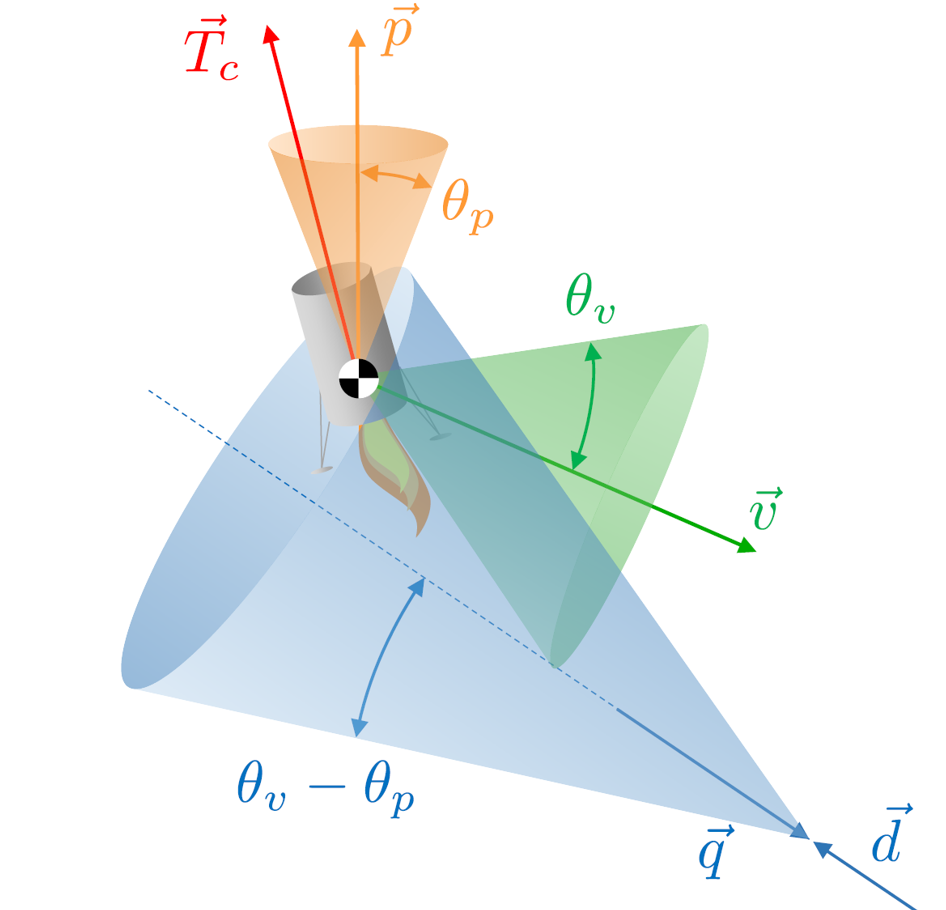
While it is relatively natural to express a coupled translational/rotational constraint in a 6-DoF formulation, there are additional challenges for a restricted 3-DoF model. We would instead like to determine the constraint set defined purely in vehicle position and thrust space (assuming a non-gimbaled engine) that guarantees existence of an attitude configuration which satisfies full visibility of the region of interest.
It can be shown that this set, defined as the Control Robust Envelope (CRE), can be parameterized by convex second-order cones (SOCs) in both the vehicle’s position and its thrust vector. This enables these constraints to be amenable to existing convex formulations for the powered descent guidance problem, notably the LCvx formulation, which provides a numerically-efficient implementation while still providing visibility guarantees. This work makes use of the theory developed in the 6-DoF SCP approach, with additional contributions for other constrained conic intersection definitions necessary for construction of the resulting constraint set.
Geometric visualization of the CRE -- the blue cone represents the positional constraint, and the orange cone represents the thrust constraint. The green cone represents the vehicle's FOV cone.
References
2024
SciTech
Constrained Visibility Guidance for 6-DOF Powered Descent Maneuvers with Terrain Scanning using Sequential Convex Programming
Samuel C Buckner, Joshua Shaffer, John M Carson, and 3 more authors
Recent advances in perceptive sensors and computer vision have motivated new formulations for powered descent guidance, wherein a vehicle must perform a pinpoint landing on a celestial body while simultaneously conducting close-range scans of the landing environment to detect and avoid potentially-unsafe hazards. Furthermore, mission plans may necessitate exploration and scouting of the environment to determine candidate landing sites in real time. In this paper, a novel six degree-of-freedom (6-DOF) optimal control formulation is presented to model visibility-based constraints such that line-of-sight to a circular ground-based region of interest is guaranteed, up to a specified discrete temporal resolution, with an accommodating theory of constrained conic intersections introduced to support this approach. This formulation, termed Constrained Visibility Guidance (CVG), further leverages and extends theory in sequential convex programming and state-triggered constraints to enable mission-practical constraint specification and transformation of a highly-nonconvex problem into one that can be iteratively solved with modern second-order cone program solvers. Ultimately, CVG is shown to be highly performant in terms of solve time and convergence properties, even under complex and highly-constrained problem design. Numerical simulation results are presented to validate these claims.
@inproceedings{buckner2024constrained,title={Constrained Visibility Guidance for 6-DOF Powered Descent Maneuvers with Terrain Scanning using Sequential Convex Programming},author={Buckner, Samuel C and Shaffer, Joshua and Carson, John M and Johnson, Breanna J and Sostaric, Ronald R and Acikmese, Behcet},booktitle={AIAA SciTech 2024 Forum},pages={1759},year={2024},url={https://arc.aiaa.org/doi/abs/10.2514/6.2024-1759},dimensions={true}}
SciTech
Implementation and Testing of Convex Optimization-based Guidance for Hazard Detection and Avoidance on a Lunar Lander
Joshua Shaffer, Chris Owens, Theresa Klein, and 5 more authors
Lunar logistics companies have experienced growth over the past few years, with interest focused on delivering payloads to hazardous areas like the South Pole. Achieving safe touchdowns while meeting precise landing requirements necessitates more and more advanced perception sensor suites and in-situ data collection of the environments. One such sensor includes hazard detection LIDARs, which typically constrain trajectories to meet specific range, velocity, time, and field of view requirements for data collection. Creating a real-time guidance solution to meet these constraints has motivated past research on solvers that use convex formulations and embed these constraints directly in the problem formulation. Maturation of these approaches has in turn motivated the testing and implementation for use in-flight and onboard a lander. While more advanced 6-DOF approaches exist, 3-DOF formulations are attractive due to their simpler implementation and faster solve times. In this paper, a 3-DOF solution for meeting convex hazard detection and avoidance constraints is presented, followed by implementation and 6-DOF testing results for both a software-in-the-loop Monte Carlo platform and a real-time hardware-in-the-loop flight processor platform. In addition, a novel constraint formulation is introduced, known as the control-robust envelope, which enables guaranteed satisfaction of hazard detection objectives. Results show that the implementation approach works in both meeting the trajectory constraints for hazard detection and avoidance and is achievable in real-time on the flight platform.
@inproceedings{shaffer2024implementation,title={Implementation and Testing of Convex Optimization-based Guidance for Hazard Detection and Avoidance on a Lunar Lander},author={Shaffer, Joshua and Owens, Chris and Klein, Theresa and Horchler, Andrew D and Buckner, Samuel C and Johnson, Breanna J and Carson, John M and Acikmese, Behcet},booktitle={AIAA SciTech 2024 Forum},pages={1584},year={2024},url={https://arc.aiaa.org/doi/10.2514/6.2024-1584},dimensions={true}}