Hazard Aware Landing Optimization (HALO) presents a combined perception (HALSS) and trajectory planning (Adaptive-DDTO) solution towards contingency planning for landing maneuvers with multiple candidate landing sites. This was an equal contribution research project between coauthor Chris Hayner and myself, published and presented at ICRA 2024 (Hayner et al., 2023), where I was primarily responsible for the Adaptive-DDTO algorithm development and implementation.
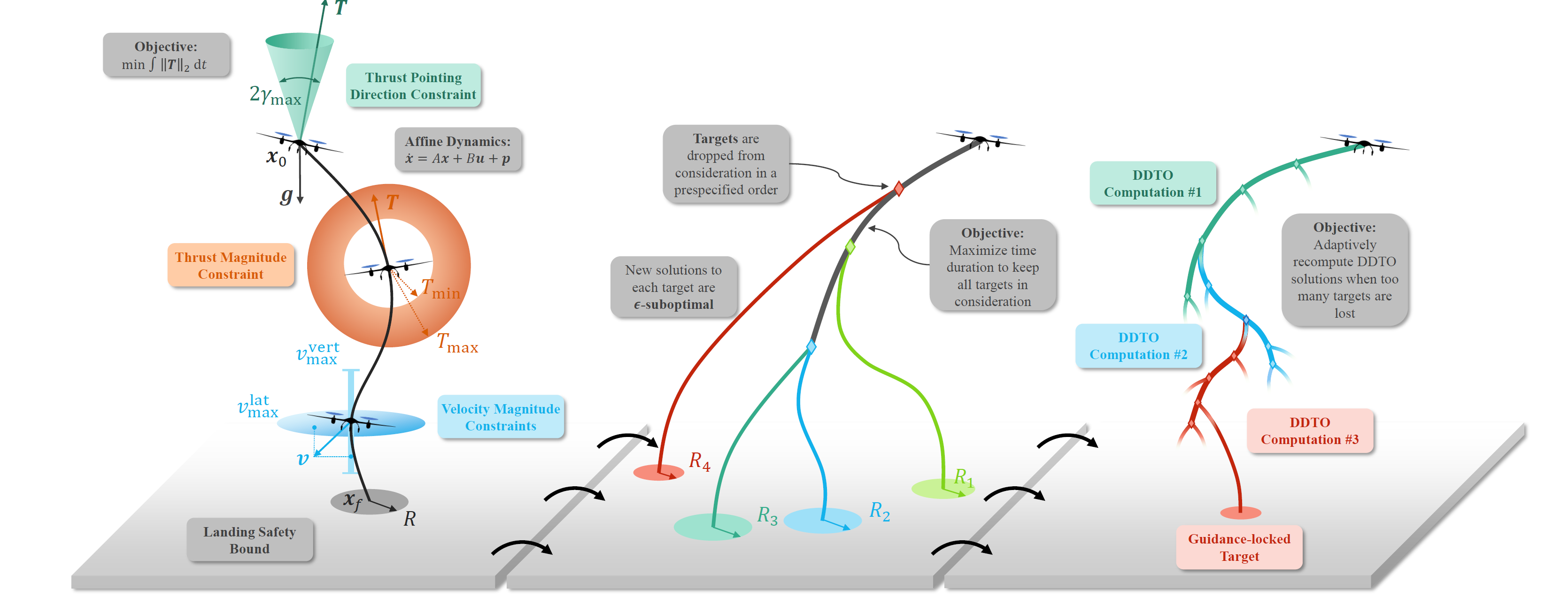
Visual illustration of the three-part modeling process for Adaptive-DDTO in a quadrotor landing context with multiple candidate landing sites
Modeling of the Adaptive-DDTO algorithm can be decomposed into three steps:
Definition of necessary path constraints, boundary conditions and objective for the single-target optimal control problem.
Extension to a multi-target scenario with the objective to maximize the time within which all targets are reachable (known in the literature as [Deferred Decision Trajectory Optimization](https://arc.aiaa.org/doi/abs/10.2514/6.2022-1583) or DDTO).
Extension to Adaptive-DDTO through an algorithm to adaptively recompute solutions as needed (whenever number of targets falls below an acceptable threshold).
Demonstration of the HALO framework applied to a quadrotor landing in a martian terrain environment
References
2023
ICRA
HALO: Hazard-Aware Landing Optimization for Autonomous Systems
Christopher R Hayner, Samuel C Buckner, Daniel Broyles, and 3 more authors
In 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
With autonomous aerial vehicles enacting safety-critical missions, such as the Mars Science Laboratory Curiosity rover’s landing on Mars, the tasks of automatically identifying and reasoning about potentially hazardous landing sites is paramount. This paper presents a coupled perception-planning solution which addresses the hazard detection, optimal landing trajectory generation, and contingency planning challenges encountered when landing in uncertain environments. Specifically, we develop and combine two novel algorithms, Hazard-Aware Landing Site Selection (HALSS) and Adaptive Deferred-Decision Trajectory Optimization (Adaptive-DDTO), to address the perception and planning challenges, respectively. The HALSS framework processes point cloud information to identify feasible safe landing zones, while Adaptive-DDTO is a multi-target contingency planner that adaptively replans as new perception information is received. We demonstrate the efficacy of our approach using a simulated Martian environment and show that our coupled perception-planning method achieves greater landing success whilst being more fuel efficient compared to a nonadaptive DDTO approach.
@inproceedings{hayner2023halo,title={HALO: Hazard-Aware Landing Optimization for Autonomous Systems},author={Hayner, Christopher R and Buckner, Samuel C and Broyles, Daniel and Madewell, Evelyn and Leung, Karen and A{\c{c}}ikme{\c{s}}e, Beh{\c{c}}et},booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},pages={3261--3267},year={2023},url={https://arxiv.org/abs/2304.01583},dimensions={true}}