VTOL Hopper Vehicle
Spring 2018 - Fall 2020
During my undergraduate degree, I worked off-and-on on a project to develop a VTOL hopper vehicle equipped with:
- A Teensy Arduino microcontroller
- A propulsive EDF (Electronic Ducted Fan)
- An IMU (Inertial Measurement Unit)
- Four servo motors for nozzle actuation
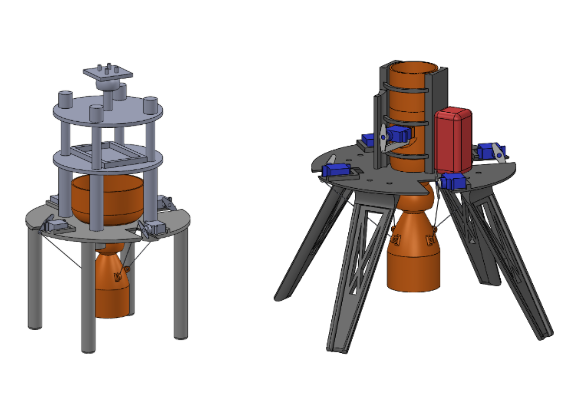
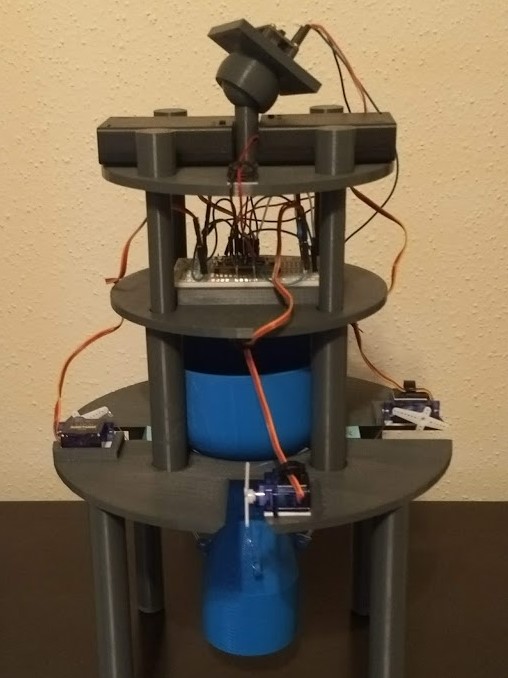
The system is designed to be 6-DOF capable, with a gimbaled nozzle for pitch/yaw control and two fins located directly below the EDF for roll control. A four-bar linkage solution to the nozzle-servo kinematics was derived and modeled in MATLAB and fed into the C-based flight software for precise servo-to-nozzle actuation mapping. A prototype test-stand was 3D-printed and assembled to test nozzle actuation in response to IMU readings. Precise motion has been confirmed at a maximum deflection angle of 24 degrees, however further design and analysis is desired before moving to the flight-ready prototype.
This project is currently on hold, however I plan to return to it when I get the available time.