Publications
Publications by categories in reversed chronological order.
2024
- SciTech
 Constrained Visibility Guidance for 6-DOF Powered Descent Maneuvers with Terrain Scanning using Sequential Convex ProgrammingSamuel C Buckner, Joshua Shaffer, John M Carson, and 3 more authorsIn AIAA SciTech 2024 Forum, 2024
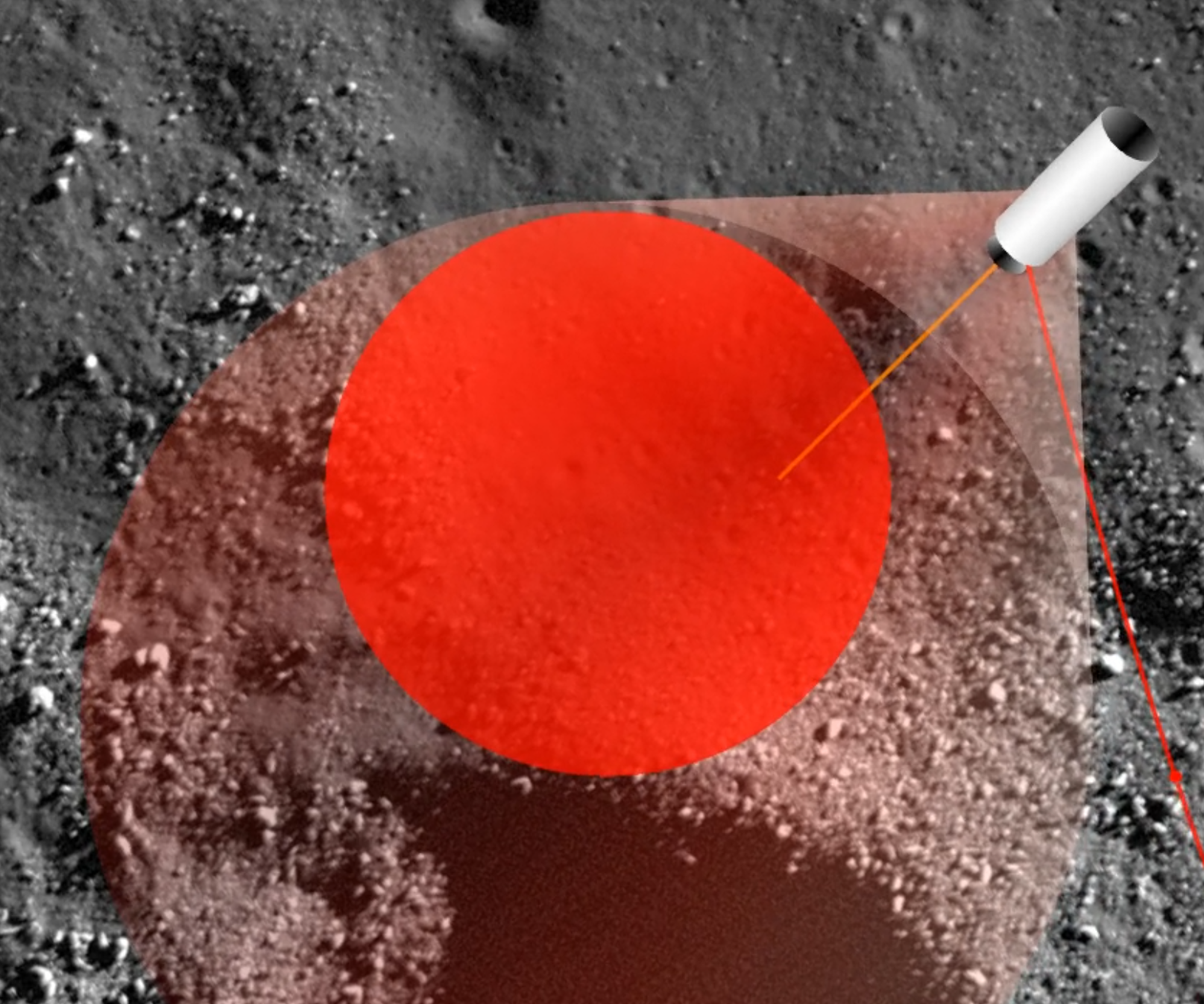
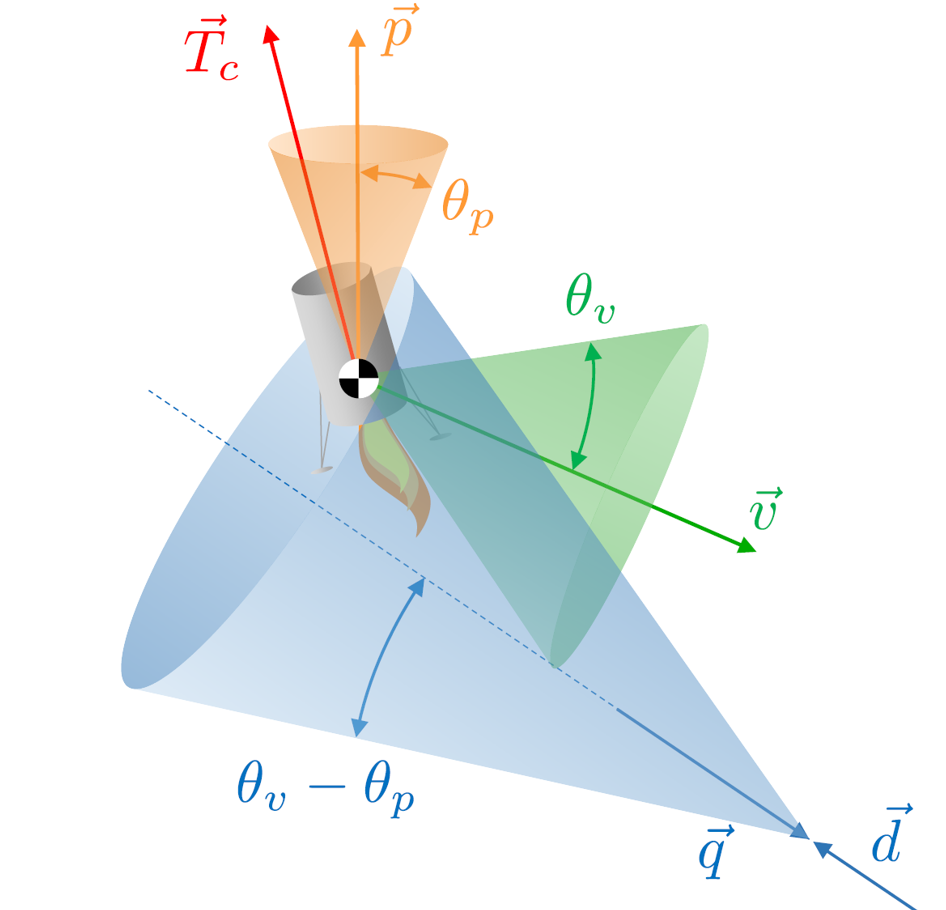
Constrained Visibility Guidance for 6-DOF Powered Descent Maneuvers with Terrain Scanning using Sequential Convex ProgrammingSamuel C Buckner, Joshua Shaffer, John M Carson, and 3 more authorsIn AIAA SciTech 2024 Forum, 2024Recent advances in perceptive sensors and computer vision have motivated new formulations for powered descent guidance, wherein a vehicle must perform a pinpoint landing on a celestial body while simultaneously conducting close-range scans of the landing environment to detect and avoid potentially-unsafe hazards. Furthermore, mission plans may necessitate exploration and scouting of the environment to determine candidate landing sites in real time. In this paper, a novel six degree-of-freedom (6-DOF) optimal control formulation is presented to model visibility-based constraints such that line-of-sight to a circular ground-based region of interest is guaranteed, up to a specified discrete temporal resolution, with an accommodating theory of constrained conic intersections introduced to support this approach. This formulation, termed Constrained Visibility Guidance (CVG), further leverages and extends theory in sequential convex programming and state-triggered constraints to enable mission-practical constraint specification and transformation of a highly-nonconvex problem into one that can be iteratively solved with modern second-order cone program solvers. Ultimately, CVG is shown to be highly performant in terms of solve time and convergence properties, even under complex and highly-constrained problem design. Numerical simulation results are presented to validate these claims.
@inproceedings{buckner2024constrained, title = {Constrained Visibility Guidance for 6-DOF Powered Descent Maneuvers with Terrain Scanning using Sequential Convex Programming}, author = {Buckner, Samuel C and Shaffer, Joshua and Carson, John M and Johnson, Breanna J and Sostaric, Ronald R and Acikmese, Behcet}, booktitle = {AIAA SciTech 2024 Forum}, pages = {1759}, year = {2024}, url = {https://arc.aiaa.org/doi/abs/10.2514/6.2024-1759}, dimensions = {true} } - SciTech
 Implementation and Testing of Convex Optimization-based Guidance for Hazard Detection and Avoidance on a Lunar LanderJoshua Shaffer, Chris Owens, Theresa Klein, and 5 more authorsIn AIAA SciTech 2024 Forum, 2024
Implementation and Testing of Convex Optimization-based Guidance for Hazard Detection and Avoidance on a Lunar LanderJoshua Shaffer, Chris Owens, Theresa Klein, and 5 more authorsIn AIAA SciTech 2024 Forum, 2024Lunar logistics companies have experienced growth over the past few years, with interest focused on delivering payloads to hazardous areas like the South Pole. Achieving safe touchdowns while meeting precise landing requirements necessitates more and more advanced perception sensor suites and in-situ data collection of the environments. One such sensor includes hazard detection LIDARs, which typically constrain trajectories to meet specific range, velocity, time, and field of view requirements for data collection. Creating a real-time guidance solution to meet these constraints has motivated past research on solvers that use convex formulations and embed these constraints directly in the problem formulation. Maturation of these approaches has in turn motivated the testing and implementation for use in-flight and onboard a lander. While more advanced 6-DOF approaches exist, 3-DOF formulations are attractive due to their simpler implementation and faster solve times. In this paper, a 3-DOF solution for meeting convex hazard detection and avoidance constraints is presented, followed by implementation and 6-DOF testing results for both a software-in-the-loop Monte Carlo platform and a real-time hardware-in-the-loop flight processor platform. In addition, a novel constraint formulation is introduced, known as the control-robust envelope, which enables guaranteed satisfaction of hazard detection objectives. Results show that the implementation approach works in both meeting the trajectory constraints for hazard detection and avoidance and is achievable in real-time on the flight platform.
@inproceedings{shaffer2024implementation, title = {Implementation and Testing of Convex Optimization-based Guidance for Hazard Detection and Avoidance on a Lunar Lander}, author = {Shaffer, Joshua and Owens, Chris and Klein, Theresa and Horchler, Andrew D and Buckner, Samuel C and Johnson, Breanna J and Carson, John M and Acikmese, Behcet}, booktitle = {AIAA SciTech 2024 Forum}, pages = {1584}, year = {2024}, url = {https://arc.aiaa.org/doi/10.2514/6.2024-1584}, dimensions = {true} } - TCST
 Dispersion Sensitive Optimal Control: A Conditional Value-at-Risk-Based Tail Flattening Approach via Sequential Convex ProgrammingKazuya Echigo, Oliver Sheridan, Samuel Buckner, and 1 more authorIEEE Transactions on Control Systems Technology, 2024
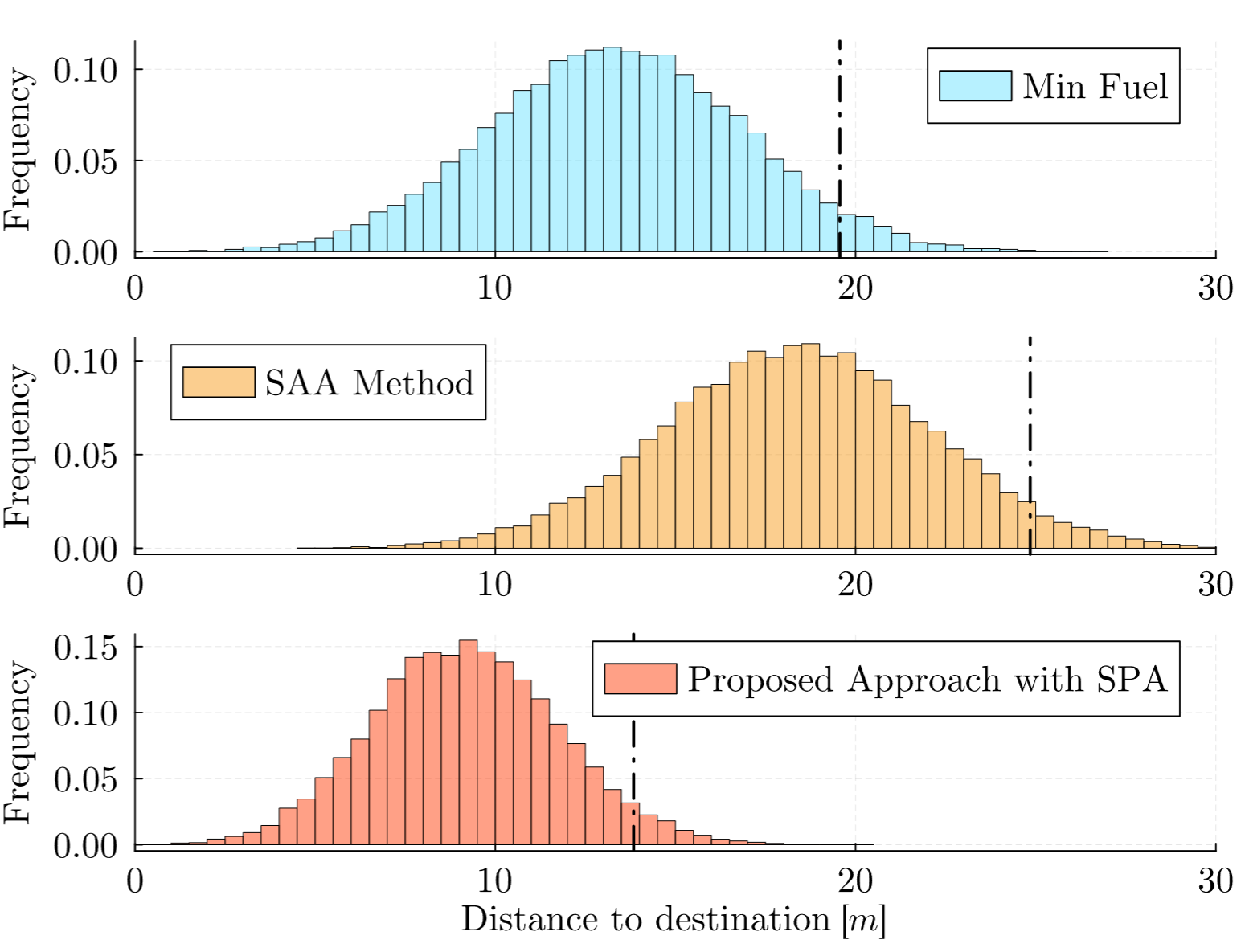
Dispersion Sensitive Optimal Control: A Conditional Value-at-Risk-Based Tail Flattening Approach via Sequential Convex ProgrammingKazuya Echigo, Oliver Sheridan, Samuel Buckner, and 1 more authorIEEE Transactions on Control Systems Technology, 2024We propose a sequential convex programming (SCP) framework for minimizing the terminal state dispersion of a stochastic dynamical system about a prescribed destination—an important property in high-risk contexts such as spacecraft landing. Our proposed approach seeks to minimize the conditional value-at-risk (CVaR) of the dispersion, thereby shifting the probability distribution away from the tails. This approach provides an optimization framework that is not overly conservative and can accurately capture more information about true distribution, compared with methods which consider only the expected value, or robust optimization methods. The main contribution of this brief is to present an approach that: 1) establishes an optimization problem with CVaR dispersion cost 2) approximated with one of the two novel surrogates which is then 3) solved using an efficient SCP algorithm. In 2), two approximation methods, a sampling approximation (SA) and a symmetric polytopic approximation (SPA), are introduced for transforming the stochastic objective function into a deterministic form. The accuracy of the SA increases with sample size at the cost of problem size and computation time. To overcome this, we introduce the SPA, which avoids sampling by using an alternative approximation and thus offers significant computational benefits. Monte Carlo simulations indicate that our proposed approaches minimize the CVaR of the dispersion successfully.
@article{echigo2024dispersion, title = {Dispersion Sensitive Optimal Control: A Conditional Value-at-Risk-Based Tail Flattening Approach via Sequential Convex Programming}, author = {Echigo, Kazuya and Sheridan, Oliver and Buckner, Samuel and A{\c{c}}{\i}kme{\c{s}}e, Beh{\c{c}}et}, journal = {IEEE Transactions on Control Systems Technology}, year = {2024}, url = {https://www.researchgate.net/publication/383438822_Dispersion_Sensitive_Optimal_Control_A_Conditional_Value-at-Risk-Based_Tail_Flattening_Approach_via_Sequential_Convex_Programming}, dimensions = {true} }
2023
- SciTech
 High-Accuracy 3-DOF Hypersonic Reentry Guidance via Sequential Convex ProgrammingSkye Mceowen, Abhinav G Kamath, Purnanand Elango, and 3 more authorsIn AIAA SciTech 2023 Forum, 2023
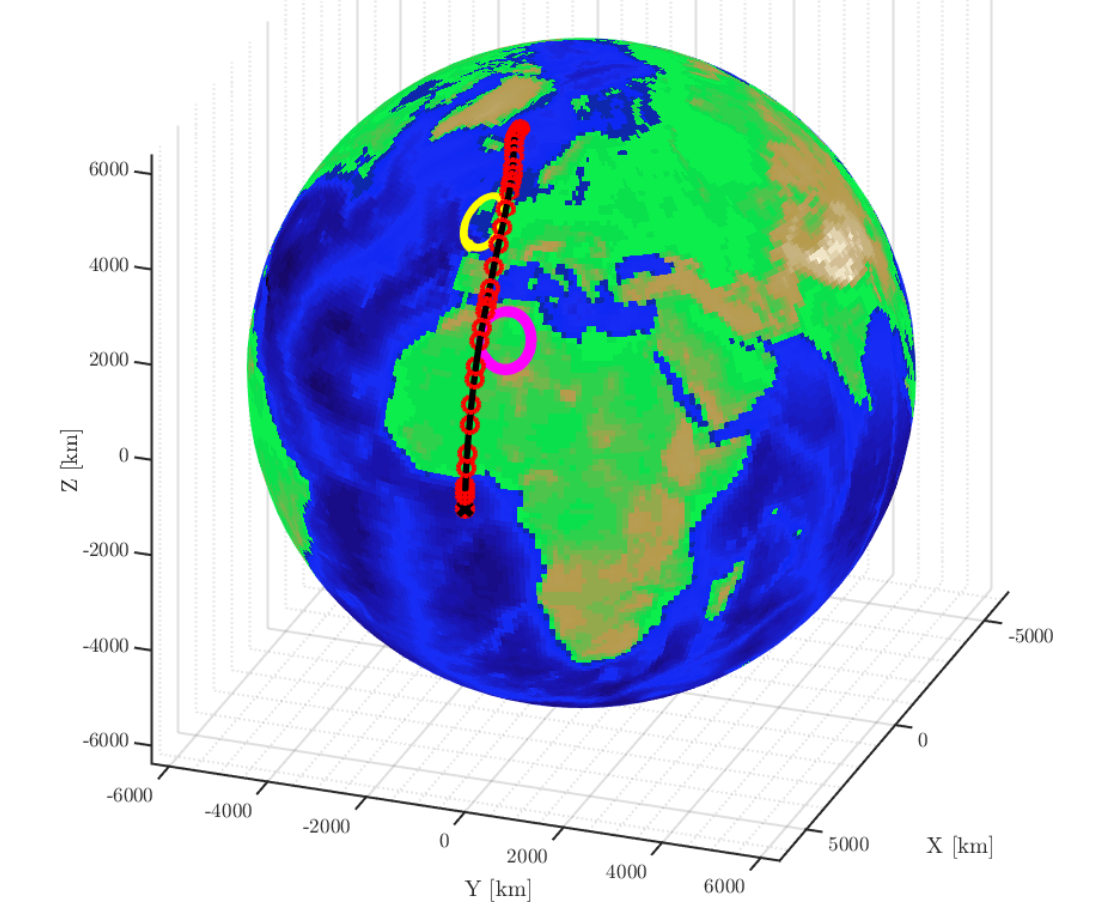
High-Accuracy 3-DOF Hypersonic Reentry Guidance via Sequential Convex ProgrammingSkye Mceowen, Abhinav G Kamath, Purnanand Elango, and 3 more authorsIn AIAA SciTech 2023 Forum, 2023This paper presents a sequential convex programming (SCP) algorithm designed to achieve dynamically feasible solutions for highly nonlinear optimal control problems over sparse time grids. This framework solves a sequence of convex subproblems until convergence to a solution of the original nonconvex problem. The proposed algorithm has the following features to enhance speed and accuracy: (1) a deviation variable model to improve the scaling of each convex subproblem; (2) an exact discretization technique that is inverse-free and permits arbitrarily-precise satisfaction of the dynamics over large time horizons; (3) a virtual buffer approach to eliminate artificial infeasibility that allows each subproblem to be represented as a quadratic program (QP); and (4) a variable time grid that leaves the timesteps between nodes (and thus the time-horizon) as free variables for the optimizer. Discretization is performed via a “stitching condition” required for the deviation variable approach. This SCP algorithm demonstrates high-fidelity satisfaction of the dynamics for particularly nonlinear systems, such as hypersonic entry vehicles, while harnessing solution speeds from quadratic programming amenable to real-time implementations. To remove jitter from the resulting control solution, a control rate limit constraint can easily be applied across each timestep due to the continuous first-order-hold parameterization of the control. To demonstrate this performance, a comprehensive study is performed for a 3-degree-of-freedom (DoF) trajectory optimization on multiple hypersonic reentry scenarios formulated as optimal control problems. When compared against state-of-the-art methods, the optimal solutions obtained by this SCP algorithm have reduced residual errors between the solution trajectory and a one-shot integration of the full nonlinear dynamics for hypersonic reentry.
@inproceedings{mceowen2023high, title = {High-Accuracy 3-DOF Hypersonic Reentry Guidance via Sequential Convex Programming}, author = {Mceowen, Skye and Kamath, Abhinav G and Elango, Purnanand and Kim, Taewan and Buckner, Samuel C and Acikmese, Behcet}, booktitle = {AIAA SciTech 2023 Forum}, pages = {0300}, year = {2023}, url = {https://arc.aiaa.org/doi/abs/10.2514/6.2023-0300}, dimensions = {true} } - ICRA
 HALO: Hazard-Aware Landing Optimization for Autonomous SystemsChristopher R Hayner, Samuel C Buckner, Daniel Broyles, and 3 more authorsIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
HALO: Hazard-Aware Landing Optimization for Autonomous SystemsChristopher R Hayner, Samuel C Buckner, Daniel Broyles, and 3 more authorsIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023With autonomous aerial vehicles enacting safety-critical missions, such as the Mars Science Laboratory Curiosity rover’s landing on Mars, the tasks of automatically identifying and reasoning about potentially hazardous landing sites is paramount. This paper presents a coupled perception-planning solution which addresses the hazard detection, optimal landing trajectory generation, and contingency planning challenges encountered when landing in uncertain environments. Specifically, we develop and combine two novel algorithms, Hazard-Aware Landing Site Selection (HALSS) and Adaptive Deferred-Decision Trajectory Optimization (Adaptive-DDTO), to address the perception and planning challenges, respectively. The HALSS framework processes point cloud information to identify feasible safe landing zones, while Adaptive-DDTO is a multi-target contingency planner that adaptively replans as new perception information is received. We demonstrate the efficacy of our approach using a simulated Martian environment and show that our coupled perception-planning method achieves greater landing success whilst being more fuel efficient compared to a nonadaptive DDTO approach.
@inproceedings{hayner2023halo, title = {HALO: Hazard-Aware Landing Optimization for Autonomous Systems}, author = {Hayner, Christopher R and Buckner, Samuel C and Broyles, Daniel and Madewell, Evelyn and Leung, Karen and A{\c{c}}ikme{\c{s}}e, Beh{\c{c}}et}, booktitle = {2023 IEEE International Conference on Robotics and Automation (ICRA)}, pages = {3261--3267}, year = {2023}, url = {https://arxiv.org/abs/2304.01583}, dimensions = {true} }
2020
- SciTech
 Fit2Fly: A Proof of Concept for Testing the Commercial Feasibility of Unmanned Aerial System OperationsRyan Bonk, Ryan Bowers, Samuel Buckner, and 5 more authorsIn AIAA SciTech 2020 Forum, 2020
Fit2Fly: A Proof of Concept for Testing the Commercial Feasibility of Unmanned Aerial System OperationsRyan Bonk, Ryan Bowers, Samuel Buckner, and 5 more authorsIn AIAA SciTech 2020 Forum, 2020As autonomous Unmanned Aerial Systems (UAS) become more prevalent, improvements in airworthiness assessments, data security, establishing vehicle trust, and more will become necessary to make fleet operations of these systems routine. Currently, these are verified for every UAS vehicle through a time-intensive manual inspection performed by human individuals. This process becomes infeasible when introduced into large-scale operations, so the Fit2Fly project is attempting to address these concerns. Fit2Fly is a multi-year project with a large scope, so we chose to narrow our focus to building a proof-of-concept feasibility simulation in tandem with physical UAS demonstration. This work resulted in a software simulation capable of running asynchronous commercial operations with persistent data modeling in coordination with several autonomous drones using integrated radio and GPS configurations.
@inproceedings{bonk2020fit2fly, title = {Fit2Fly: A Proof of Concept for Testing the Commercial Feasibility of Unmanned Aerial System Operations}, author = {Bonk, Ryan and Bowers, Ryan and Buckner, Samuel and Byrd, Cameron and Crayton, Hannah and Tam, Kyle and Thomas, Taylor W and Wallis, Jordan}, booktitle = {AIAA SciTech 2020 Forum}, pages = {0740}, year = {2020}, url = {https://arc.aiaa.org/doi/10.2514/6.2020-0740}, dimensions = {true} } - SmallSat
 A Novel Approach to CubeSat Flight Software Development Using Robot Operating System (ROS)Samuel Buckner, Carlos Carrasquillo, Marcus Elosegui, and 1 more authorIn 34th Annual AIAA/USU Small Satellite Conference, 2020
A Novel Approach to CubeSat Flight Software Development Using Robot Operating System (ROS)Samuel Buckner, Carlos Carrasquillo, Marcus Elosegui, and 1 more authorIn 34th Annual AIAA/USU Small Satellite Conference, 2020The large-scale development and deployment of small satellite systems in the modern aerospace sector motivates the parallel development of new flight software and avionics systems to meet the demands of modern spaceflight operations. Robot Operating System (ROS) provides an open-sourced and modular software framework that can be adapted for space-faring purposes in addition to the standard robotics operations that it is intended for. At the University of Florida’s Advanced Autonomous Multiple Spacecraft (ADAMUS) Laboratory, this framework, serving as the first flight-ready implementation of ROS in spacecraft flight software architecture, will be used in two upcoming CubeSat missions: (1) The Drag De-Orbit Device (D3) mission and (2) the PAssive Thermal Coating Observatory Operating in Low earth orbit (PATCOOL) mission. These missions will serve to validate the reusability of this software and the core functionality contained within, supporting tasks such as data link transmission, command processing, GNC (guidance, navigation & control), avionics system health diagnostics and soft/hard reboot instantiation. These capabilities draw upon the foundations of ROS in which tasks are handled by software modules that communicate through a language-agnostic messaging system resulting in an efficient multiprocessing architecture. Improvements and design considerations are also proposed in addition to suggestions for possible future use-cases of ROS in spaceflight software design.
@inproceedings{buckner2020novel, title = {A Novel Approach to CubeSat Flight Software Development Using Robot Operating System (ROS)}, author = {Buckner, Samuel and Carrasquillo, Carlos and Elosegui, Marcus and Bevilacqua, Riccardo}, booktitle = {34th Annual AIAA/USU Small Satellite Conference}, year = {2020}, url = {https://digitalcommons.usu.edu/smallsat/2020/all2020/241/}, dimensions = {true} }